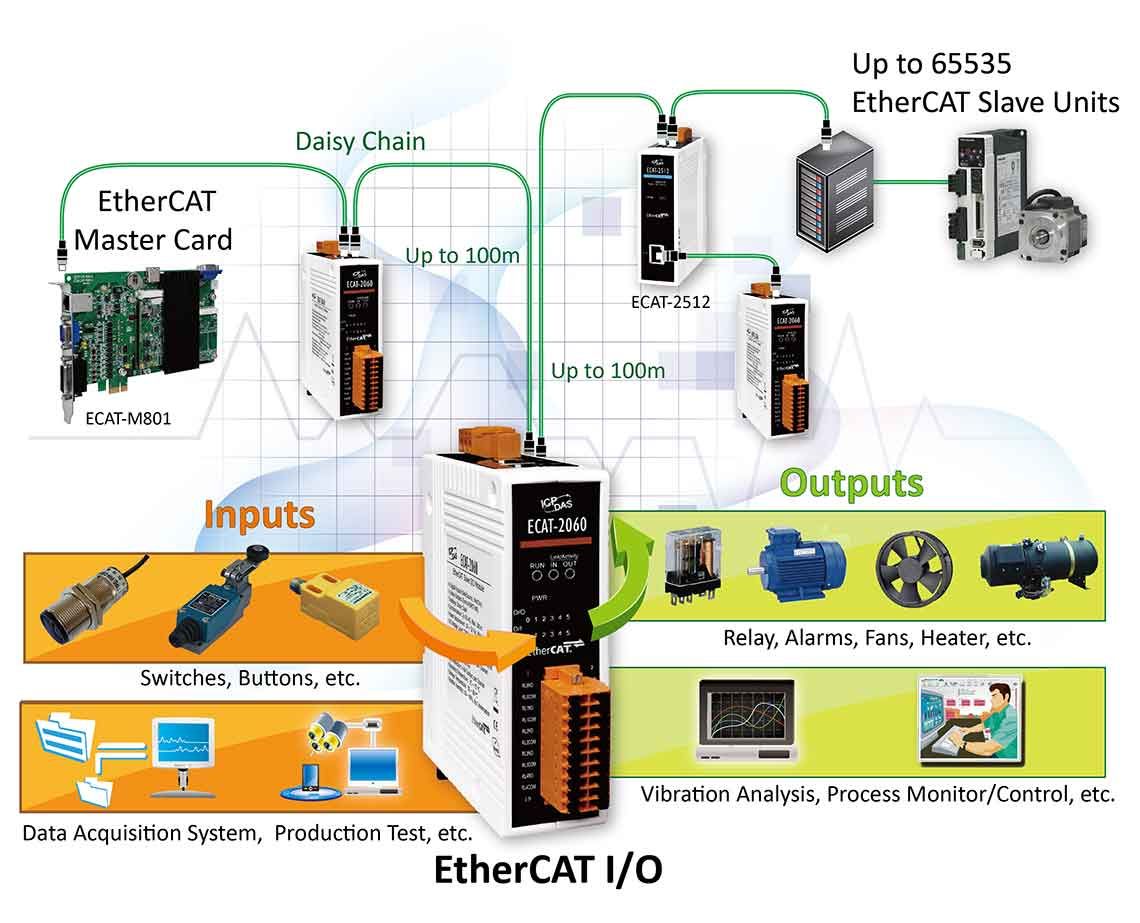
EtherCAT I/O Overview
Comparison Table:
| Series | ECAT-2000 series | EC1 series | EC2 series | EC4 series |
|---|---|---|---|---|
|
Product |
 |
 |
 |
 |
|
Type |
Remote | plug-in | Remote | Remote |
|
Casing |
Plastic | Metal (anti-noise) | Plastic | |
|
Interface |
RJ45 x 2 | ICP DAS Plug-in Terminals | RJ45 x 2 | RJ45 x 2 (coupler) |
|
Cycle Time |
1 ms (Typical) | 100 μs (Typical) | ||
|
I/O points |
DIO: up to 32 points AI: up to 16 points AO: up to 8 points |
DIO: up to 32 points AI: up to 16 points AO: up to 8 points |
DIO: 16 x 12 points AI: 8 x 12 points AO: 4 x 12 points |
|
|
FOE online update |
- | √ | ||
|
Explicit Device ID |
- | √ | ||
|
Terminal block |
Detachable | - | Detachable | |
|
Lockable RJ45
|
- | Designed by the user | √ | - |
|
Dimensions (W x L x H) |
33 x 127 x 108 mm 31 x 157 x 126 mm |
20 x 98 x 84 mm | 83 x 112 x 65 mm | 17 x 98 x 72 mm 24 x 98 x 72 mm |
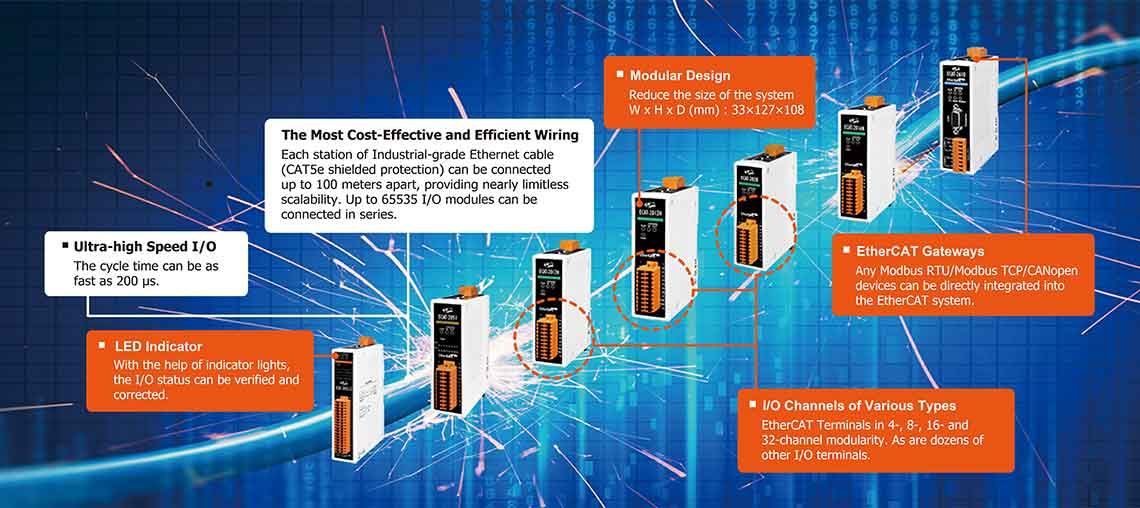
Ultra-high-speed I/O
Cycletime up to 100 us
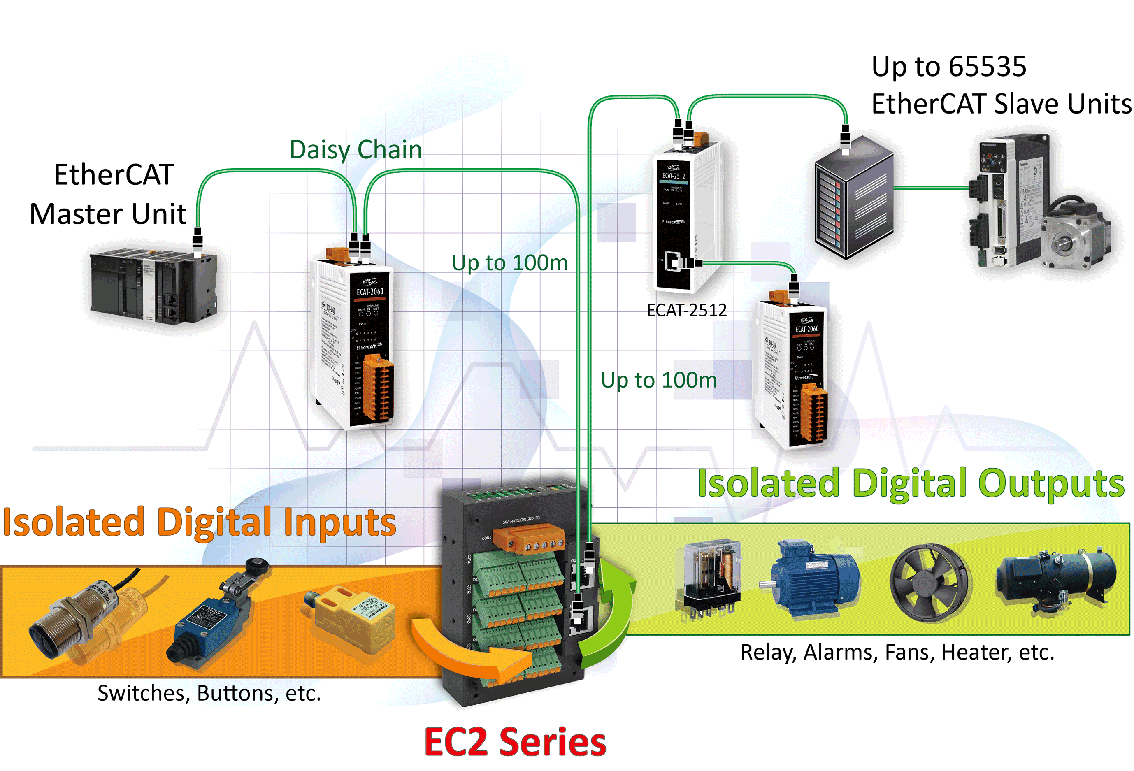
Most cost-effective wiring
Industrial Ethernet cable (CAT5e shielding protection) The distance of each station can be up to 100 meters, and the expansion can be nearly unlimited. Up to 65535 I/O modules can be connected in series
Variety of I/O channels
A wide variety of I/O modules are available including EtherCAT I/O modules offering 4, 8, 16 and 32 channels.
LED indicator
Troubleshoot and verify I/O status through indicator lights
Modular design
Saving system volume W x H x D (mm) : 33×127×108
Faster and faster
In order to meet the faster application requirements of ICP DAS users, the EC series supports a faster 100 μs Cycle time.

Screw-lockable RJ45 connector
There are screw holes (20 mm spacing) on both sides of the RJ45 connector. In addition to the general network cable, the network cable with screw locking can also be used to reduce the risk of the network cable falling off due to vibration.

Easy and fast firmware update
EC series modules all provide FOE online firmware update function. When your module encounters a situation that requires immediate firmware update to solve the problem, you can solve the problem immediately with just one click.

Explicit Device ID
Explicit Device ID is one of the ways to identify the module, and a unique ID number can be set through the external rotary switch of the module. This feature can be used to connect and disconnect products in certain applications and to prevent incorrect cable installation during EtherCAT wiring work.

|
|
|||||||||
|
Analog Input
|
|||||||||
| Model | EtherCAT | AI | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Channel | Resolution | Sampling Rate | Input Range | Sensor Input | Accuracy | ||
| ECAT-2011H
|
1 ms | N/A | 8 Diff/16 S.E | 12-bit | 1k Hz per channel |
0 ~ 1 0V, ±10 V, ±5 V, ±2.5 V, 0 ~ 20 mA, ±20 mA, 4 ~ 20 mA or ±4 ~ 20 mA (Software selectable) |
- | 0.2% of LSB | |
| ECAT-2012H
|
16-bit | 1k Hz per channel (Max. for 6 channels enable) |
0.05% of LSB | ||||||
| ECAT-2016-3
|
3 (Strain Gauge) |
16-bit | 1k Hz per channel |
±10 V, ±5 V, ±2.5 V, ±1.25 V, ±625 mV, ±312 mV, ±200 mV, ±100 mV, ±50 mV, ±25 mV |
Full-Bridge | ±0.1% of FSR | |||
| ECAT-2016N
|
1 (Strain Gauge) |
±1.25 V, ±600 mV, ±300 mV, ±125 mV, ±80 mV, ±60 mV, ±40 mV, ±30 mV, ±20 mV, ±15 mV, ±10 mV |
|||||||
|
|
|||||||||
|
Analog Output
|
|||||||||
| Model | EtherCAT | AO | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Channel | Resolution | Input Range | Sensor Input | Accuracy | Output Capability | ||
| ECAT-2024
|
1 ms | Yes | 4 | 12-bit | 0 ~ 5 V, +/- 5 V, 0 ~ 10 V, +/- 10 V |
- | ±2 LSB | 10V @ 5 mA | |
| ECAT-2028
|
8 | ||||||||
| ECAT-2028C | ±5 V, ±10 V, 0 ~ 5V, 0 ~ 10V, 0 ~ 10 mA, 0 ~ 20 mA | ||||||||
|
|
||||||||
|
DC Digital I/O
|
||||||||
| Model | EtherCAT | Digital Input | Digital Output | |||||
|---|---|---|---|---|---|---|---|---|
| Cycle Time | Distributed Clocks | Channel | Type | Channel | Type | Max. Load Current | ||
| ECAT-2057
|
200 us | Yes | - | - | 16 | Open Collector (Source , PNP) |
100 mA/Channel | |
| ECAT-2057P
|
500 mA/Channel | |||||||
| ECAT-2057-NPN
|
Open Collector (Sink , NPN) |
100 mA/Channel | ||||||
| ECAT-2057-8P8N
|
16 | Open Collector (Sink , NPN) |
||||||
| Open Collector (Source , PNP) |
||||||||
| ECAT-2057-32
|
32 | Open Collector (Source , PNP) |
500 mA/channel | |||||
| ECAT-2045
|
200 us | Yes | - | - | 16 | Open Collector (Sink , NPN) |
700 mA/channel | |
| ECAT-2045-32
|
1 ms | 32 | 500 mA/channel | |||||
| ECAT-2045K-32 | ||||||||
| ECAT-2051
|
200 us | Yes | 16 | Dry (Source), Wet (Sink/Source) |
- | - | - | |
| ECAT-2051-32
|
1 ms | 32 | ||||||
| ECAT-2050
|
200 us | Yes | 13 | Dry (Source), Wet (Sink/Source) |
4 | Open Collector (Sink ,NPN/Source ,PNP) (Jumper Selectable) |
100 mA/channel | |
| ECAT-2052
|
200 us | Yes | 8 | Wet (Sink/Source) | 8 | Open Collector (Source , PNP) |
100 mA/channel | |
| ECAT-2052-NPN
|
Open Collector (Sink , NPN) |
|||||||
| ECAT-2053
|
200 us | Yes | 16 | Wet (Sink/Source) | - | - | - | |
| ECAT-2055
|
200 us | Yes | 8 | Dry (Source), Wet (Sink/Source) |
8 | Open Collector (Sink , NPN) |
700 mA (Single Output) |
|
| ECAT-2055-32
|
1 ms | 16 | 16 | 700 mA/channel | ||||
| ECAT-2060
|
200 us | Yes | 6 | Dry (Source), Wet (Sink/Source) |
6 | Relay, Form A (SPST-NO) |
5 A/channel | |
| ECAT-2061
|
- | - | 16 | |||||
|
|
|||||||
|
DC Digital I/O Module
|
|||||||
| Model | EtherCAT | Digital Input | Digital Output | ||||
|---|---|---|---|---|---|---|---|
| Cycle Time |
Distributed Clocks |
Channel | Type | Channel | Type | Max. Load Current | |
| EC1-P32 | 100 us | Yes | 32 | Dry (Source), Wet (Sink/Source) | - | - | - |
| EC1-C32 | 100 us | Yes | - | - | 32 | Open Collector (Sink) | 150 mA/channel |
| EC1-P16C16 | 100 us | Yes | 16 | Dry (Source), Wet (Sink/Source) | 16 | Open Collector (Sink) | 150 mA/channel |
|
|
|||||||
|
DC development board
|
|||||||
| Model | Ports | Connector | |||||
|---|---|---|---|---|---|---|---|
| DN-EC01 | EtherCAT, 2xRJ45 | 6-pin pluggable terminal block x 8 & 5-pin pluggable terminal block x 1 | |||||
|
|
|||||||
|
DC Digital I/O
|
|||||||
| Model | EtherCAT | Digital Input | Digital Output | ||||
|---|---|---|---|---|---|---|---|
| Cycle Time |
Distributed Clocks |
Channel | Type | Channel | Type | Max. Load Current | |
| EC2-P32 | 100 us | Yes | 32 | Dry (Source), Wet (Sink/Source) |
- | - | - |
| EC2-C32 | 100 us | Yes | - | - | 32 | Open Collector (Sink) |
150 mA/channel |
| EC2-P16C16 | 100 us | Yes | 16 | Dry (Source), Wet (Sink/Source) |
16 | Open Collector (Sink) |
150 mA/channel |
|
|
|||||||
|
|
|||||||
| Model | Analog Input | Analog Output | Digital Output | ||||
|---|---|---|---|---|---|---|---|
| Channel | |||||||
| EC2-AIO0804 |
8 | 4 | 12 | ||||

|
|
|||||||
|
Couplers and expansion
|
|||||||
| Model | EtherCAT | Explicit Device ID | Interface | Port Number | Size mm (W x L x D) |
||
|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | ||||||
| EC4-EP21 | 100 us | Free Run SM DC |
Up to 256 | RJ-45 | 2 | 25 x 108 x 93 | |
| EC4-EP20E | N/A | ||||||
|
|
||||||||
|
Digital input and output
|
||||||||
| Model | EtherCAT | Digital Input | Digital Output | Size mm (W x L x D) |
||||
|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | Channel | Type | Channel | Type | Max. Load Current | ||
| EC4-C16 | 100 us | Free Run SM DC |
- | - | 16 | Open Collector (Sink) |
500 mA/ channel |
17.5 x 108 x 73 |
| EC4-A16 | - | - | Open Collector (Source) |
|||||
| EC4-P16 | 16 | Dry (Source), Wet (Sink/Source) |
- | - | ||||
|
|
|||||||||
|
Relay output
|
|||||||||
| Model | EtherCAT | Digital Input | Relay Output | Size mm (W x L x D) |
|||||
|---|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | Channel | Type | Channel | Type | Max. Load Current | |||
| EC4-R8 | 100 us | Free Run SM DC |
- | - | 8 | Form A | 5 A@30V | 17.5 x 108 x 73 | |
| EC4-P4R4 | 4 | Dry (Source), Wet (Sink/Source) |
4 | ||||||
|
|
||||||||
|
Voltage/Current output
|
||||||||
| Model | EtherCAT | Channel | Resolution | Range | Accuracy | Capability | Size mm (W x L x D) |
|
|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | |||||||
| EC4-DA4 | 100 us | Free Run SM DC |
4 | 12-bit | ±5 V, ±10 V, 0 ~ 5V, 0 ~ 10V, 0 ~ 10 mA, 0 ~ 20 mA |
± 2 LSB | 10V @ 5mA | 17.5 x 108 x 73 |
| EC4-DA4H | 16-bit | ±5 V, ±10 V, 0 ~ 5V, 0 ~ 10V, 0 ~ 20 mA, 4~20mA |
± 4 LSB | |||||
|
|
||||||||
|
Voltage measurment
|
||||||||
| Model | EtherCAT | Channel | Resolution | Isolation Protect | Sampling Rate | Range | Size mm (W x L x D) |
|
|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | |||||||
| EC4-AD8 | 100 us | Free Run SM |
8 Diff | 16-bit | N/A | 1k Hz per Channel | 0 ~ 10 V, +/- 2.5 V, +/- 5 V, +/- 10 V |
17.5 x 108 x 73 |
| EC4-AD8H | 10k Hz per Channel | |||||||
| EC4-AD8R |
V | 1k Hz per Channel | ||||||
|
|
||||||||||
|
Strain Measurement
|
||||||||||
| Model | EtherCAT | Channel | Resolution | Isolation Protect |
Sampling Rate | Range | Sensor Input | Accuracy | Size mm (W x L x D) |
|
|---|---|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | |||||||||
| EC4-LC1 | 100 us | Free Run/SM |
1 | 24-bit | N/A | 1k Hz per Channel |
±10 V, ±5 V, ±2.5 V, ±1.25 V, ±625 mV, ±312 mV, ±200 mV, ±100 mV, ±50 mV, ±25 mV (Software selectable) |
Full Bridge (10VDC) |
±0.1% of FSR |
25 x 108 x 73 |
|
|
||||||||
|
Temperature measurement
|
||||||||
| Model | EtherCAT | Sensor Input | Channel | Resolution | Sampling Rate | Accuracy | Size mm (W x L x D) |
|
|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | |||||||
| EC4-TC8 | 100 us | Free Run SM |
Thermocouple (J, K, T, E, R, S, B, N, C, L, M, and LDIN43710) |
8 | 16-bit | 100 Hz per Channel |
±0.1% of FSR | 25 x 108 x 73 |
| EC4-RTD8 | Pt100, Pt1000, Ni120 | 17.5 x 108 x 90 | ||||||
|
|
|||||||
|
Motor Controller / Driver
|
|||||||
| Model | EtherCAT | CiA402 | Axis | Digital Input | Digital Output | Size mm (W x L x D) |
|
|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | ||||||
| EC4-MS1 | 500 us | Free Run SM DC |
V | 1 (Stepping) | - | - | 25 x 108 x 73 |
| EC4-MP1U | 1 (Pulse) | ||||||
|
|
||||||||
|
Encoder Counter
|
||||||||
| Model | EtherCAT | Type | Channel | Resolution | Frequency | Counting Mode | Size mm (W x L x D) |
|
|---|---|---|---|---|---|---|---|---|
| Cycle time | Sync. mode | |||||||
| EC4-ENC2IT | 200 us | Free Run SM DC |
Incremental type |
2 × Encoder counter inputs 2 x Latch outputs |
32-bit | 4 MHz | CW/CCW, Pulse/Direction, A/B Phase |
17.5 × 108 × 90 |
| EC4-ENC2A | 100 us | Absolute type |
2(BiSS-C/SSI) | 48-bit | 10 MHz | - | ||
| EC4-ENC4A | 200 us | 4(BiSS-C/SSI) | ||||||
