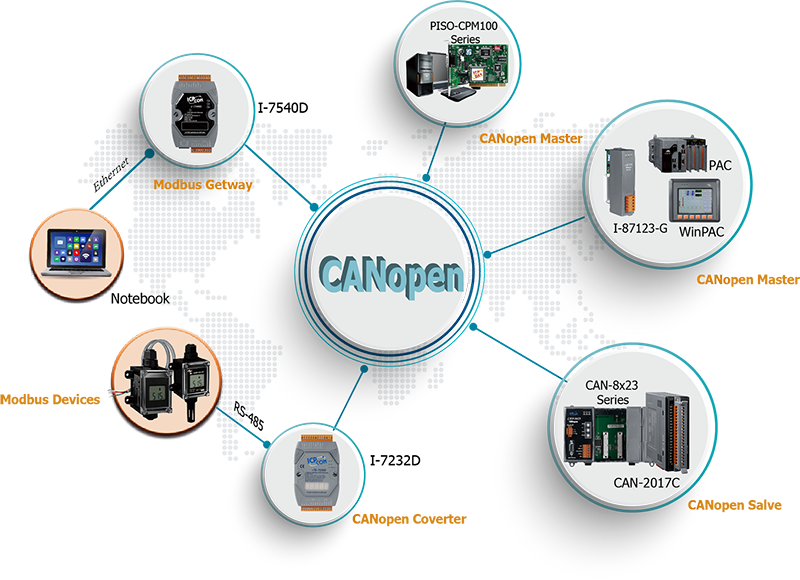
CANopen是一種基於CAN的應用層協議,是作為標準化的嵌入式網路而開發的,具有高度靈活的配置能力,CANopen專為面向運動的機器控制網路而設計的,例如搬運系統,目前它被廣泛應用於醫療設備、越野車、航海電子、公共交通、樓宇自動化等眾多領域。
CANopen規範涵蓋應用層和通訊架構,以及可編程設備的框架、建議的通訊線、連接器、SI單位和前綴的表示,其中應用層以及基於CAN的框架是透過軟體來實現。
CANopen特性:
- 允許在一個總線網路上使用多主端架構
- 10k,20k,50k,125k,250k,500k,800k,1M bps波特率
- 總線長度從25m(1M bps)到5Km(10K bps)
- 輕鬆訪問所有設備參數
- 支援設備同步
- 支援循環和事件驅動的數據傳輸
- 在一個CAN網路上最多可以同時有128個節點
- 傳輸速度高
- 支持Guarding和Heartbeat保護機制
CANopen通訊:
| 初始化 | 預操作 | 操作 | 停止 | |
|---|---|---|---|---|
| PDO | X | |||
| SDO | X | X | ||
| 同步對象 | X | X | ||
| 時間戳對象 | X | X | ||
| 緊急對象 | X | X | ||
| 啟動對象 | X | |||
| 網絡管理對象 | X | X | X |
CANopen狀態轉換:
輕量級設備監控:
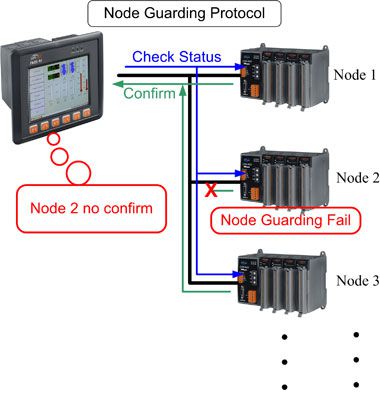
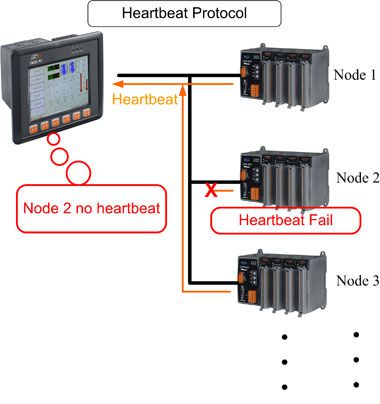
CANopen提供了兩種網路保護機制,Node Guarding和Heartbeat,對於Node Guarding,主站會發送檢查從站狀態的請求,如果某個從站不回應這個請求,主站會顯示他們為Node Guarding Fail狀態,對於Heartbeat,這些從站會向主站發送心跳訊息,讓主站知道這些從站還活著,如果主站沒有檢測到某個從站的心跳,那麼主站會顯示他為Heartbeat Fail狀態。
CANopen數位I/O連接對
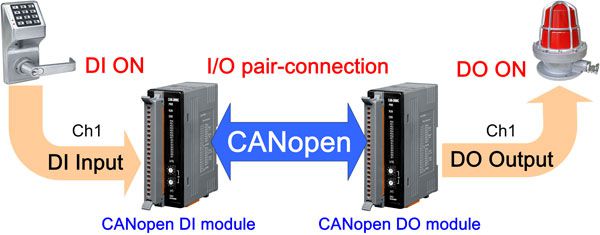

CAN-2000與CAN-8000系列模組是為了將感測器和致動器併入CANopen或DeviceNet網路所設計,兩者皆提供與CANopen或DeviceNet主站介面通訊標準相應的EDS文件檔,CAN-2000與CAN-8000系列最大的差異在於產品的尺寸以及I/O的延伸距離,CAN-2000系列為掌上型尺寸的獨立從站設備;CAN-8000系列則適用於集中控制系統,提供1/2/4/8個插槽靈活使用適當的 I/O設備以滿足應用系統的需求,所有的插槽均具備熱插拔功能,您可以選用I-8000/I-87K系列的I/O模組來擴展I/O通道。
CANopen: CAN-8x23, CAN-2xxxC
CANopen系列共同特點:
- 在一個CAN網路上最多可以同時有128個節點
- CANopen 版本:DS-301 v4.01
- 設備配置文件:DSP-401 v2.0
- 錯誤控制 (NMT Error Control):節點保護協議與心跳機制協議
- 緊急信息 (EMCY):有支援
- CAN端有 2500Vrms 光電耦合隔離
- 內建CAN總線120Ω終端電阻的跳線或指撥開關
- 內建看門狗機制
|
|
||||||||
|
多功能輸入輸出模組
|
||||||||
| 產品型號 | 類比輸入 | 類比輸出 | 數位輸入 | 數位輸出 | ||||
|---|---|---|---|---|---|---|---|---|
| 通道數 | Input Range | 通道數 | Output Range | 通道數 | Contact | 通道數 | Type | |
| CAN-2026C
|
6 | ±10 V, ±5 V, ±1 V, ±500 mV, ±150 mV, ±20 mA (with external 125 Ω resistor) |
2 | 0 ~ +5 V, ±5 V, 0 ~ +10 V, ±10 V |
2 |
Wet, Sink
|
1 | Open Collector, CAN-2026D DeviceNet Sink |
| CAN-2022C
|
2 | ±10V, ±5V, ±2.5V, ±1.25V, ±1V, ±500mV, ±250mV | 2 | 0 ~+5V, +/-5V, 0~+10V,+/-10V |
4 | Wet contact (Sink) | 4 | Isolated Open Collector (Sink) |
|
|
|||||
|
類比輸入、輸出模組
|
|||||
| 產品型號 | 類比輸入 | 類比輸出 | |||
|---|---|---|---|---|---|
| 通道數 | Input Range | Sensor | 通道數 | Output Range | |
| CAN-2015C
|
8 | - | RTD (Pt100, Pt1000, Ni120, Cu100, Cu1000, Pt100) | - | - |
| CAN-2017C
|
8 | ±10 V, ±5 V, ±1 V, ±500 mV, ±150 mV, ±20 mA (with external 125 Ω resistor) |
- | - | - |
| CAN-2018C/S
|
8 | ±2.5 V, ±1 V, ±500 mV, ±100 mV, ±50 mV, ±15 mV, ±20 mA (with external 125 Ω resistor) |
Thermocouple (J, K, T, E. R. S, B, N, C) |
- |
- |
| CAN-2019C/S
|
10 | ±10 V, ±5 V, ±2.5 V, ±2 V, ±500 mV, ±100 mV, ±50 mV, ±15 mV, ±20 mA (with external 125 Ω resistor) |
Thermocouple (J, K, T, E. R. S, B, N, C) |
- | - |
| CAN-2019C/S2
|
|||||
| CAN-2024C
|
- | - | - | 4 | 0 ~ +5 V, ±5 V, 0 ~ +10 V, ±10 V, 0 ~ 20 mA, 4 ~ 20 mA |
|
|
|
|
遠端I/O擴充單元
|
|
| 產品型號 | 描述 |
|---|---|
| CAN-8123-G
|
CANopen 從站, 1槽 擴充單元 |
| CAN-8223-G
|
CANopen 從站, 2槽 擴充單元 |
| CAN-8423-G
|
CANopen 從站, 4槽 擴充單元 |
| CAN-8823-G
|
CANopen 從站, 8槽 擴充單元 |
|
|
|
模組支援
| 類型 | I-8K 系列 I/O | I-87K系列I/O | 類型 | I-8K 系列 I/O | I-87K系列I/O | ||||
|---|---|---|---|---|---|---|---|---|---|
| 高卡 | 低卡 | 高卡 | 低卡 | 高卡 | 低卡 | 高卡 | 低卡 | ||
| AI模組 | I-8014W | DI模組 | I-8040W | I-8040 | I-87040W | I-87040 | |||
| I-8014CW | I-87005W | I-8040PW | I-87040PW | ||||||
| I-8017HS | I-8017H | I-87013W | I-87013 | I-8040W-A1 | |||||
| I-8017HW | I-8046W | I-87046W | |||||||
| I-8017DW | I-87015W | I-8048W | I-8048 | I-87051W | I-87051 | ||||
| I-8017HCW | I-87015PW | I-8051W | I-8051 | I-87052W | I-87052 | ||||
| I-87016W | I-8052W | I-8052 | I-87053W | I-87053 | |||||
| I-87017W | I-87017 | I-8053W | I-8053 | I-87053PW | |||||
| I-87017W-A5 | I-8053PW | I-87053W-A5 | |||||||
| I-87017W-RMS | I-8053W-A1 | I-87053W-A2 | |||||||
| I-87017RCW | I-8058W | I-8058 | I-87053W-AC1 | ||||||
| I-87017DW | I-87053W-E5 | ||||||||
| I-87017ZW | I-87058W | I-87058 | |||||||
| I-87017RW | I-87059W | ||||||||
| I-87018W | I-87018 | ||||||||
| I-87018PW | AO模組 | I-8024W | I-8024 | I-87024RW | I-87022 | ||||
| I-87018RW | I-8024UW | I-87024W | I-87024 | ||||||
| I-87018ZW | I-8028UW | I-87024DW | I-87026 | ||||||
| I-87019RW | I-8026W | I-87024UW | |||||||
| I-87019PW | I-87028UW | ||||||||
| I-87019ZW | I-87028VW | ||||||||
| DO模組 | I-8037W | I-8037 | I-87037W | I-87028VW-20V | |||||
| I-8041W | I-8041 | I-87041W | I-87041 | I-87028CDW | |||||
| I-8041PW | I-87041PW | ||||||||
| I-8041AW | I-87057W | I-87057 | |||||||
| I-87057PW | DI & DO模組 | I-8042W | I-8042 | I-87054W | I-87054 | ||||
| I-8056W | I-8056 | I-87061W | |||||||
| I-87061PW | I-8050W | I-8050 | I-87055W | I-87055 | |||||
| I-8057W | I-8057 | I-87064W | I-87064 | ||||||
| I-8057PW | I-8054W | I-8054 | I-87063W | I-87063 | |||||
| I-8060W | I-8060 | I-87065W | I-87065 | I-8055W | I-8055 | ||||
| I-8064W | I-8064 | I-87066W | I-87066 | I-8063W | I-8063 | ||||
| I-8065 | I-87068W | I-87068 | |||||||
| I-87068W-2A | I-8077 | ||||||||
| I-8066 | I-87069W | I-87069 | |||||||
| I-8068W | I-8068 | I-87069PW | 計數器模組 | I-8084W | I-8080 | ||||
| I-8069W | I-8069 | PWM模組 | I-8088W | ||||||
|
|
||
| 型號 | CANopen閘道器系列 | |
|---|---|---|
| 產品名稱 | I-7232D-G
|
GW-7433D
|
| 產品描述 | CANopen從站轉Modbus RTU主站的閘道器 | Modbus RTU/TCP從站轉CANopen主站閘道器 |
| CANopen Interface | ||
| CANopen Interface | 1 channel (CAN_H, CAN_L), and the other is for bypass | |
| CANopen Function | CANopen slave | CANopen master (Supports at least 120 CANopen commands) |
| CANopen Baud Rate | 10 k, 20 k, 50 k, 125 k , 250 kbps , 500 k, 800 k, 1M | |
| CANopen Version | CiA 301 v 4.02 and CiA 401 v2.01 | |
| Guarding Function | Yes | |
| Heartbeat Function | Heartbeat Producer | Heartbeat Consumer |
| Emergency Message | Yes | - |
| UART Interface | ||
| COM1 Connector | RS-232 (TxD, RxD, RTS, CTS, GND) or RS-485 (Data+, Data-), Non-isolated | RS-232 (TxD, RxD, RTS, CTS, GND), Non-isolated |
| COM1 Function | Only for configuration | Modbus RTU Slave |
| COM2 Connector | RS-485 (Data+, Data-) with internal Self-Tuner ASIC; Non-isolated | |
| COM2 Function | Modbus RTU Master (Supports Max. 10 Modbus RTU ommands) |
Modbus RTU Slave |
| Ethernet Interface | ||
| Ethernet | - | 10/100 Base-TX |
| Ethernet Function | - | Configuration or Modbus TCP Server |
| Modbus Function Code | 01, 02, 03, 04, 06, 15 | 01, 02, 03, 04, 05, 06, 15,16 |
CANopen主站系列是用於PAC的I-8123W與I-87123 和用於PC上的PISO-CPM100,該系列內部有CANopen主內核,因此它們可用於高性能系統。我們也有提供帶有CANopen主站函式庫的PISO-CAN卡做為比較低成本的解決方案。
|
|
|
|
CANopen主站選型指南
|
|
| 產品名稱 | 描述 |
|---|---|
| PISO-CPM100-D
|
單通道智能型CANopen主站PCI板卡(D-Sub 9針公座) |
| PISO-CPM100-T
|
單通道智能型CANopen主站PCI板卡(5針螺絲端子) |
| PISO-CPM100U-D
|
單通道智能型CANopen主站Universal PCI板卡(D-Sub 9針公座) |
| PISO-CPM100U-T
|
單通道智能型CANopen主站Universal PCI板卡(5針螺絲端子) |
| PEX-CPM100-D
|
單通道智能型CANopen主站PCI Express板卡(D-Sub 9針公座) |
| PEX-CPM100-T
|
單通道智能型CANopen主站PCI Express板卡(5針螺絲端子) |
| I-8123W-G
|
高速單通道智能型CANopen主站模組 |
| I-9123
|
高速單通道智能型CANopen主站模組 |
| I-8123W-CPS-G
|
高速單通道智能型CANopen從站模組 |
| I-87123-G
|
單通道智能型CANopen主站模組 |
| I-7565-CPM-G
|
USB轉CANopen主站的轉換器 |
CANopen Master Series:
| 產品名稱 | I-7565-CPM | PISO-CPM100(U) | PEX-CPM100 | PISO-CAN 200/400(U) | PEX-CAN200i | I-8123W | I-9123 | I-87123 | |
|---|---|---|---|---|---|---|---|---|---|
| 硬體 | On board CPU | 16-bit CPU 80M Hz |
16-bit CPU 80M Hz |
None | None | 16-bit CPU 80M Hz |
16-bit CPU 80M Hz |
||
| Interface | USB | 5 V / 3.3 V PCI bus | x1 PCI Express bus | 5 V / 3.3 V PCI bus |
x1 PCI Express bus | I-8K Slot | I-9K Slot | I-87K Slot (WinPAC,ViewPAC) | |
| CAN Connector | 9-pin D-Sub | 5-pin screw terminal 9-pin D-Sub |
5-pin screw terminal 9-pin D-Sub |
5-pin screw terminal 9-pin D-Sub |
5-pin screw terminal | 5-pin screw terminal | |||
| CAN Controller | SJA1000 | ||||||||
| CAN Transceiver | 82C250 | ||||||||
| Isolation on CAN | 2500 Vrms | ||||||||
| Terminal Resistor | Selected by jumper(120Ω) | ||||||||
| CANopen | Protocol Specification | CANopen Standard -- CiA Draft Standard 301 | |||||||
| Baud Rate Selection | Programmable | ||||||||
| Baud Rate | 10 kbps, 20 kbps, 50 kbps, 125 kbps , 250 kbps , 500 kbps, 800 kbps, 1000 kbps | ||||||||
| Maximum Slave nodes | 127 Nodes | ||||||||
| PDO Function | Support dynamic PDO function | ||||||||
| PDO Object | Provide 20 RxPDO and 20 TxPDO object | ||||||||
| EMCY Message | Save the least EMCY | ||||||||
| SDO Protocol | Support Expedited SDO and Segment SDO protocol | ||||||||
| On Line Edit Nodes | Support adding or removing devices on line | ||||||||
| NMTError Control | Support Node Guarding Event | ||||||||
| 驅動程式 | DLL | Support | |||||||
| OS Version | Win 2K/XP | Windows XP/7/8/10 (32-bit/64-bit OS) | Win CE 6/7, WES7 | Win CE 5/6 | |||||
| Development Tool | Visual C++ 6 , Visual Basic 6 , Borland C++ Builder , Delphi | VS .NET | eVC++ 4 , VS .NET | ||||||
PISO-CAN 200/400-D/T的比較
硬體比較:
PISO-CPM100與PISO-CAN 200/400-D/T的效能測試
| 產品名稱 | PISO-CPM100 | PISO-CAN-200/400 with CANopen Library |
|---|---|---|
| Protocol decoder | 186 CPU | PC CPU |
| Time stamp | 186 Timer (0.1 ms) | PC Timer (about 1 ms) |
| CPU Loading | Light | Heavy |
| Performance | High | Normal |
| Application | Various and complex CANopen application | General purpose CANopen application |
測試環境:
作業系統:Microsoft Windows XP Professional Version 2002 Service Pack 2
RAM:512 MB
CAN傳輸速率:1000 bps
Test result:
| Function | PISO-CPM100 (ms) | PISO-CAN200/400 with CANopen library (ms) |
|---|---|---|
| Add Node | Average 45.502 | 1265 ~ 1280 |
| Read 4 bytes data by SDO | Average 2.487 | 19.37 ~ 19.47 |
| Read 9 bytes data by SDO | Average 2.971 | 58.21 ~ 58.61 |
| Write 4 bytes data by SDO | Average 2.479 | 18.81 ~ 19.69 |
| Read 8 bytes data by PDO | Average 2.355 | 16.49 ~ 16.57 |
| Write 8 bytes data by PDO | Average 1.738 | 0.13 |
註1:
上表資料為1000筆訊息的平均值
註2:
如果使用PISO-CAN200/400搭配CANopen 函式庫中的Guarding功能,當從站較多且Guarding時間較短時會產生Guard錯誤事件。 這是因為windows 的計時器不夠準確的緣故。
I-8123W / PISO-CPM100U現已提供運動控制的函式庫,此函式庫遵循CiA 402的規範,可在ViewPAC / WinPAC / XPAC平台上使用。CiA 402是一個標準的CANopen應用規範,專門用於運動控制系統,為了使CANopen的馬達方便管理,這個通訊協定可以減少控制器與馬達間的接線並提供快速除錯的功能,使用I-8123W / PISO-CMP100U和CANopen 運動控制函式庫,可以進行多種運動控制,如位置控制、速度控制、轉矩控制( toque control)以及同動,而不需要去了解複雜的CANopen通訊協議。CANopen 運動控制函式庫可以連接多個CANopen馬達,因此可以做到由一個主站進行多軸的運動控制,當在控制馬達的時候,用戶也可以同時使用I-8123W / PISO-CPM100U的API來存取遵循CiA 401規範的CANopen遠端 I/O設備,因此建立一個運動控制的應用系統將變得更為容易且方便。
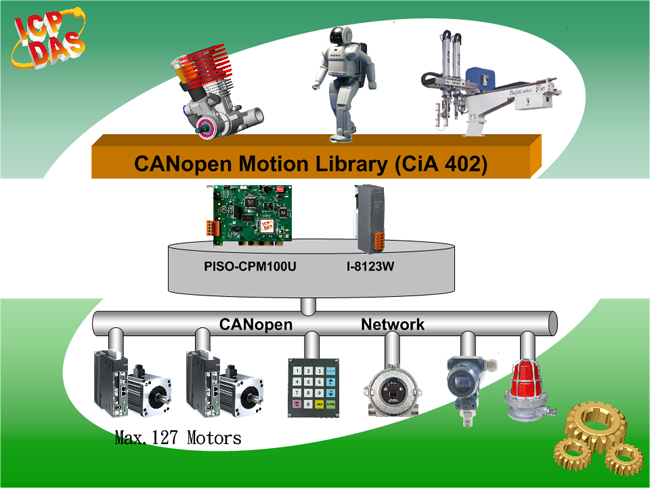
特色:
- 與CiA 402 v1.1相容
- 減少50% 的佈線成本
- 網路實體層的容錯與抗雜訊
- 一個網路最多支援127個馬達
- 絕對與相對位置控制
- 速度控制
- 轉矩控制 (Torque control)
- 點動控制 (JOG control)
- 支援最多127個馬達同動
- 多種歸位控制(Various Homing control)
- 支援CANopen 命令來限制轉矩(torque)
- 支援 Win 2000/XP/Vista 或 Win 7(32-bit 版本)

