
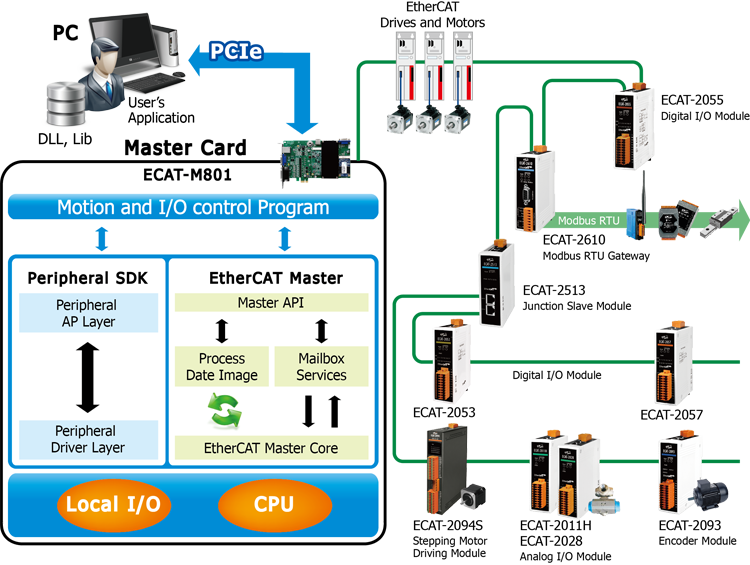
泓格為 EtherCAT 總線提供全方位的產品組件包括主卡、 主站運動控制器及多達幾拾種多種的從站其中包括常見的 I/O、分岐器、轉換器、閘道器、運動控制模組等等 .. 應 有盡有。使用泓格為 EtherCAT 系統優化實時性的主卡讓 您的系統有效的降低系統負荷、提昇控制效率及精度更可 以帶來更高品質的生產效率
| EtherCAT主站型號 |  ECAT-M801系列 |
 EMP-9000系列 |
 EMP-2000系列 |
 ECATDAQ |
|
|---|---|---|---|---|---|
| 類型 | PCI Express主站卡 | PAC/PLC控制器 | PLC控制器 | Windows函式庫 | |
| 內建數位I/O通道 | 8 DI & 8 DO 通道 | I/O 擴充元件 | N/A | N/A | |
| 控制週期 | 0.5 ms | 0.5 ms | 0.5 ms | 20 ms | |
| 最多從站數 | 512 站 | 512 站 | 128 站 | 20站 | |
| 支援第三方從站 | V | X | |||
| 步進/伺服馬達軸數 | 8~64 軸 | 16~32 軸 | 16 軸 | 8軸 | |
| 運動控制功能 | •支援 CiA-402 驅動器 •PLCopen •多軸直線/圓弧補間/連續補間/螺旋補間 •運動中改變位置/速度 •T/S曲線加減速 |
•支援CiA-402驅動 •PLCopen •即時性 •單軸運動控制 •T曲線加減速 |
•支援 CiA402 驅動器 PP, HOME 模式 •單軸運動控制 |
||
| 設定工具 | ECAT Utility | IE/Firefox/Chrome瀏灠器(網頁) | N/A | ||
| 軟體(SDK) | •Windows API •Linux API •Demos for C, C++, C#, VB, Python, LabVIEW |
•Windows API •Demos for C, C++, C#, VB, Python, LabVIEW |
N/A | •Windows API •Demos for C, C++, C#, VB, Python, LabVIEW |
|
| 軟體(Win-GRAF) | •SoftPLC (Win-GRAF) •OPC UA Server |
N/A | |||
| 備註 | 不需額外安裝EtherCAT主站卡 | ||||
特色
 EtherCAT是用於機械自動化的最快的工業網絡,可連接到I/O、 伺服馬達、步進馬達、編碼器和智慧傳感器等等。EtherCAT透 過乙太網路達成高速、可靠及高效率數據傳輸。所有EtherCAT 從站設備都具有雙網口,無需額外的硬體( 如交換機,集線器 或路由器)即可實現便利的網路拓撲。
EtherCAT是用於機械自動化的最快的工業網絡,可連接到I/O、 伺服馬達、步進馬達、編碼器和智慧傳感器等等。EtherCAT透 過乙太網路達成高速、可靠及高效率數據傳輸。所有EtherCAT 從站設備都具有雙網口,無需額外的硬體( 如交換機,集線器 或路由器)即可實現便利的網路拓撲。
EtherCAT是工業乙太網
EtherCAT通訊協定是針對程序資料而進行優化,利用標準的 IEEE 802.3 乙太網幀傳遞,在全雙工模式 100 Mbps 運作
靈活的拓撲
每個設備皆帶有兩個EtherCAT端口,不需其他交換器即可建立線性網路。另外可透過EtherCAT 分岐器來建立樹型和星型拓撲
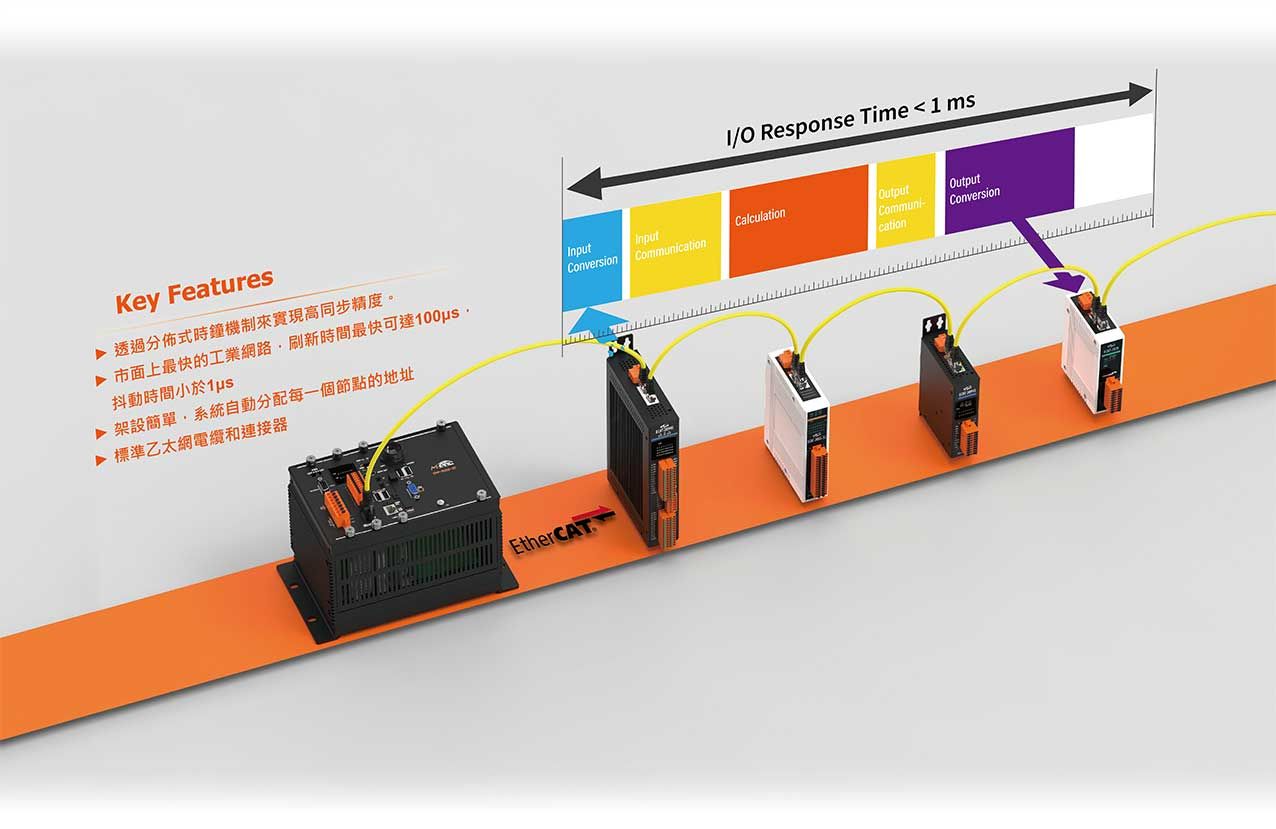
分佈式時鐘
EtherCAT節點從站測量之間的時間差傳入和傳回幀-時間戳記。用這些主機可以確定傳播延遲的時間戳準確地偏移到各個從站。該機制確保抖動小於 1μs 的器件之間實現精確同步
佈線方便
EtherCAT使用標準的100BASE-TX 乙太網並通過乙太網電纜和連接頭形成的標準屏蔽可以非常有效率的進行通信,不需透過交換器
使用簡單,一連就通
相比於傳統的現場總線系統,EtherCAT擁有強大的優勢,節點地址可被自動配置,不需要網路調校,集成的診斷訊息可精確定位錯誤,無需配置交換器,也不需要處理復雜的MAC及IP位置
飛速傳輸-即時數據交換
從站設備即時提交/置入數據隨時保持超高數據吞吐量

運動控制應用
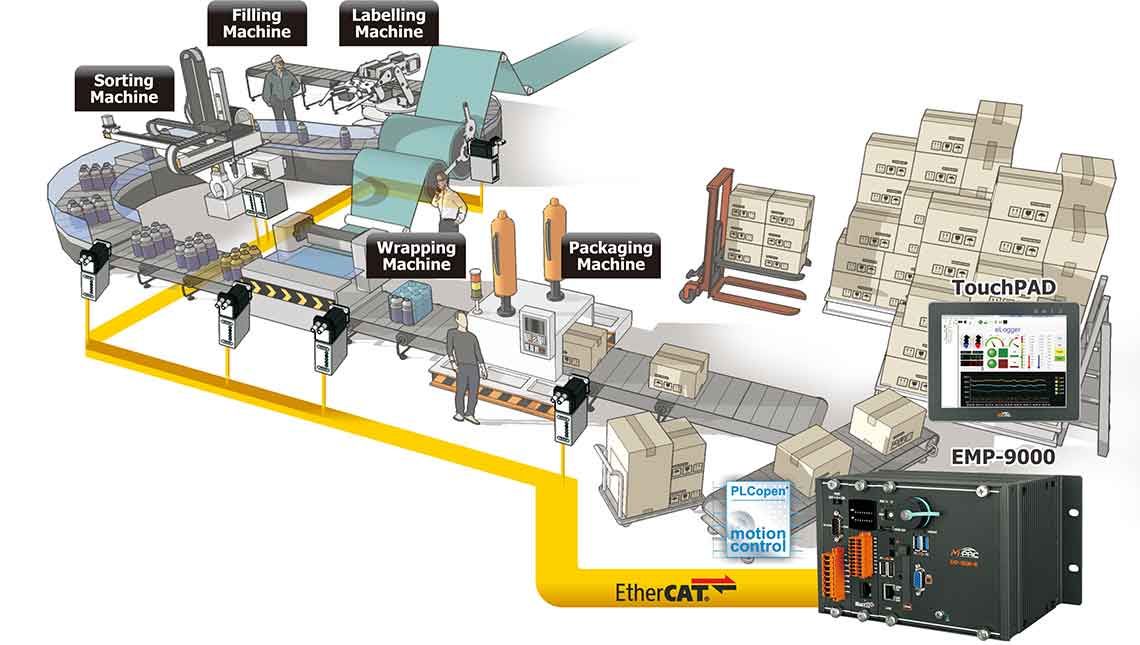
零組件取放
- 轉移與堆疊裝置
- 龍門式取放
- 自動拾取、放置、測量和分類零組件
輸送系統
- 工件在輸送機上的定位
- 搬運和運輸設備
- 產品檢驗
- 在線棧板堆疊機
- 貼標機
零件組裝系統
- 精密點焊機
- 密封、膠合、接合應用
- 在表面上添加膠水以連接零件
- 密封:將密封劑塗在零件的接合面上
- 點膠機: 塗膠
入庫
- 自動化的存儲和檢索系統
- 自動從存儲櫃中存儲和檢索托盤
切割,研磨和壓製應用
半導體製造
- IC 檢查
- IC 晶片安裝與組裝
- 拾取組件並將它們放置在印刷電路板上
- 相機檢測:
- 使用移動相機檢查
- 使用相機進行多點檢查
機器人控制
- 控制單軸機器人
- 控制用於噴塗應用的多個單軸機器人
- 雙驅動器: 同步並移動兩個相同類型的單軸機器人
實測過市面上常見驅動器與馬達列表
|
公司 |
驅動器 |
馬達種類 |
|---|---|---|
|
Delta 台達 |
ASDA A2-E 系列 |
AC 伺服馬達 |
|
Hiwin 上銀 |
D2 系列 |
AC 伺服馬達 |
|
Moons' 鳴志 |
STF/RS 系列 |
兩相步進馬達 |
|
Mitsubishi 三菱 |
MR-JET |
AC 伺服馬達 |
|
Oriental Motor 東方馬達 |
AZ 系列多軸驅動器 |
閉迴路步進馬達 |
|
Panasonic 國際 |
A5B/A6B 系列 |
AC 伺服馬達 |
|
Shihlin 士林 |
SDP 系列 |
AC 伺服馬達 |
|
Sanyo Denki 山洋電氣 |
R 系列 |
AC 伺服馬達 |
|
Teco 東元電機 |
JSDG2/JSDG2S |
AC 伺服馬達 |
|
Yaskawa 安川電機 |
Sigma 7 系列 |
AC 伺服馬達 |
| Master Series
|
||||||||
|
EMP-9000 系列:基於 PAC 的運動控制系列,內置 EtherCAT 主站
|
||||||||
| 型號 | ||||||||
|---|---|---|---|---|---|---|---|---|
| CPU | RAM | I/O Slot | 週期時間 | EtherCAT Slaves | EtherCAT Axes | |||
| EMP-9051-16
|
i5-8365UE | 16 GB | 0 | .5/1/2/4/8 ms | Max. 512 | Max. 16 | ||
| EMP-9051-32
|
Max. 32 | |||||||
| EMP-9251-16
|
2 | Max. 16 | ||||||
| EMP-9251-32
|
Max. 32 | |||||||
| EMP-9651-16
|
6 | Max. 16 | ||||||
| EMP-9651-32
|
Max. 32 | |||||||
| EMP-9091-16
|
Atom E3950 | 8 GB | 0 | Max. 16 | ||||
| EMP-9091-32
|
Max. 32 | |||||||
|
|
||||||||
|
EMP-9000 系列:基於 SoftPLC 的運動控制系列,內置 EtherCAT 主站
|
||||||||
| 型號 | ||||||||
|---|---|---|---|---|---|---|---|---|
| CPU | RAM | I/O Slot | 週期時間 | EtherCAT Slaves | EtherCAT Axes | |||
| EMP-9058-16
|
i5-8365UE | 16 GB | 0 | 0.5 ms (min) | Max. 512 | Max. 16 | ||
| EMP-9058-32
|
Max. 32 | |||||||
| EMP-9258-16
|
i5-8365UE | 16 GB | 2 | Max. 16 | ||||
| EMP-9258-32
|
Max. 32 | |||||||
| EMP-9658-16
|
i5-8365UE | 16 GB | 6 | Max. 16 | ||||
| EMP-9658-32
|
Max. 32 | |||||||
| EMP-9098-16
|
Atom E3950 | 8 GB | 0 | Max. 16 | ||||
| EMP-9098-32
|
Max. 32 | |||||||
| Master Series
|
||||||||
|
EMP-2000 系列:基於 SoftPLC 的緊湊型運動控制系列,內置 EtherCAT 主站
|
||||||||
| 型號 | ||||||||
|---|---|---|---|---|---|---|---|---|
| OS | CPU | 系統記憶體 | 儲存裝置 | EtherCAT | ||||
| 通訊週期 | 從站數 | 軸數 | ||||||
| EMP-2848M
|
Real-Time Linux (RT-Preempt) | Cortex-A53, Quad-core, 1.6GHz | LPDDR4 - 1GB | eMMC Flash – 8GB, 4GB microSD 卡 | 500 μs (最小週期) | 128 | 16 | |
| Master Series
|
||||||||
|
EMP-4000 系列:基於 SoftPLC 的超微型控制器
|
||||||||
| 型號 | ||||||||
|---|---|---|---|---|---|---|---|---|
| OS | CPU | 系統記憶體 | 儲存裝置 | EtherCAT | ||||
| 通訊週期 | 從站數 | 軸數 | ||||||
| EMP-4648
|
Real-Time Linux (RT-Preempt) | Cortex-A53, Quad-core, 1.4GHz | DDR4 - 2GB | eMMC Flash – 8GB | 500 μs (最小週期) | 128 | 16 | |
|
|
||||||||||
|
Master Series
|
||||||||||
| 型號 | EtherCAT | 編碼器 輸入 | 數位輸入 & 輸出 | 零配件 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Port | Axes | Slave | 週期時間 |
|
解析度 | 通道數 | 端子板 | 線 | ||
| ECAT-M808 series |
1 x RJ-45 | Max. 8 | Max. 512 | 0.5ms | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | - / Yes | - / Yes | |
| Max. 16 | ||||||||||
| Max. 32 | ||||||||||
| Max. 64 | ||||||||||
| ECAT-M801 series | 1 x RJ-45 | Max. 8 | Max. 512 | 1 MHz | 32-bit | 13-ch DI & 13-ch DO | - / Yes | - / Yes | ||
| Max. 16 | ||||||||||
| Max. 32 | ||||||||||
|
|
|||
|
Win-GRAF: 基於 Windows 的 SoftPLC,具有 PLCopen 定義的運動命令
|
|||
| 型號 | EtherCAT | PLCopen | OPC UA Server |
|---|---|---|---|
| Win-GRAF PC Runtime |
Yes (ECAT-M801 required) |
Yes (ECAT-M801 required) |
Yes |
