1-port CAN, 可程式化 PCI-104 模組
特色
- PCI-104 compliant
- Compatible with CAN specification 2.0 part A and B
- Fully compatible with the ISO 11898-2 standard
- Support several kinds of baud rate from 10 kbps ~ 1 Mbps
- 2500 Vrms photocoupler isolation on the CAN side
- Built-in jumper for 120 Ω terminal resistor of CAN bus
- 3 kV galvanic isolation
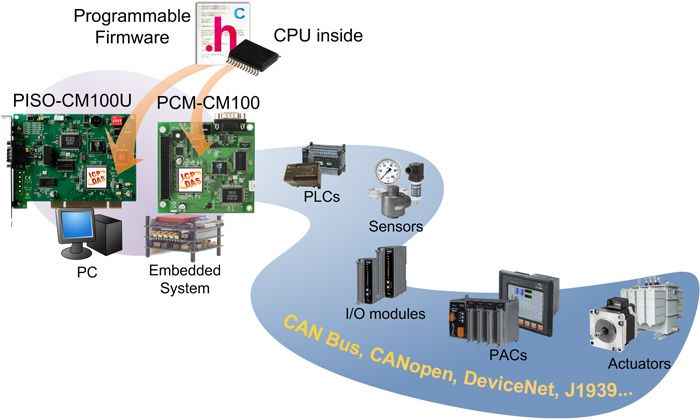
- 80186, 80MHz CPU inside
- Allow users to program their special firmware
- Timestamp with at least ±1ms precision
介紹
The CAN (Controller Area Network) is a serial communication protocol, and efficiently supports distributed real-time control with a very high level of security. It is an especially suited for networking "intelligent" devices as well as sensors and actuators within a system or sub-system. In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but instead prioritized messages are transmitted.
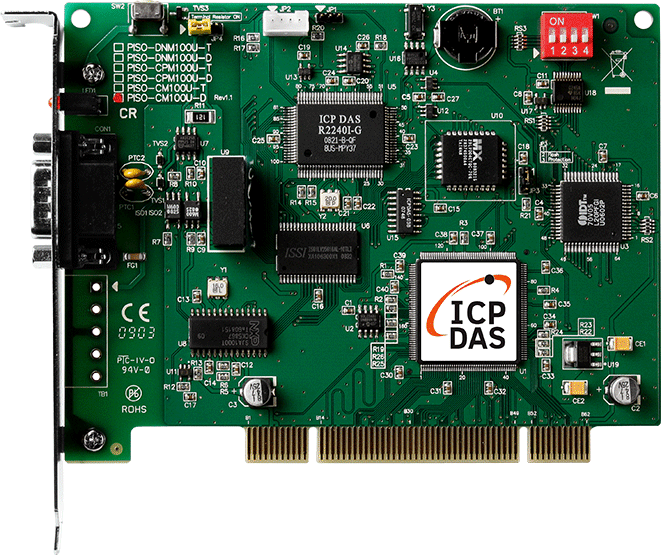
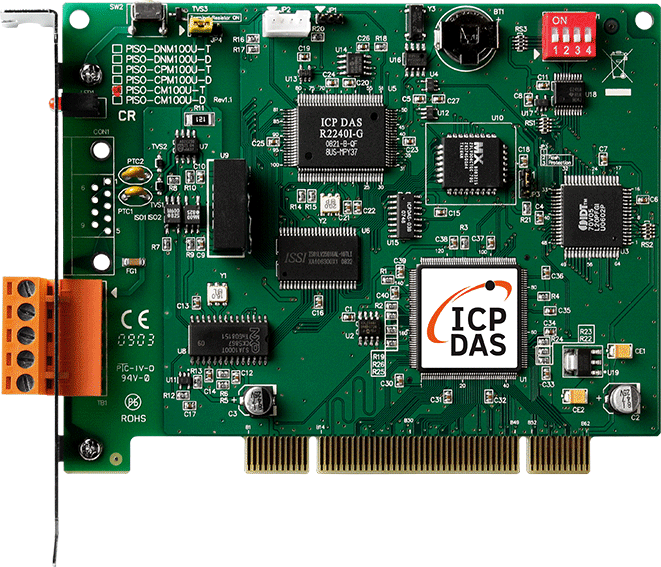
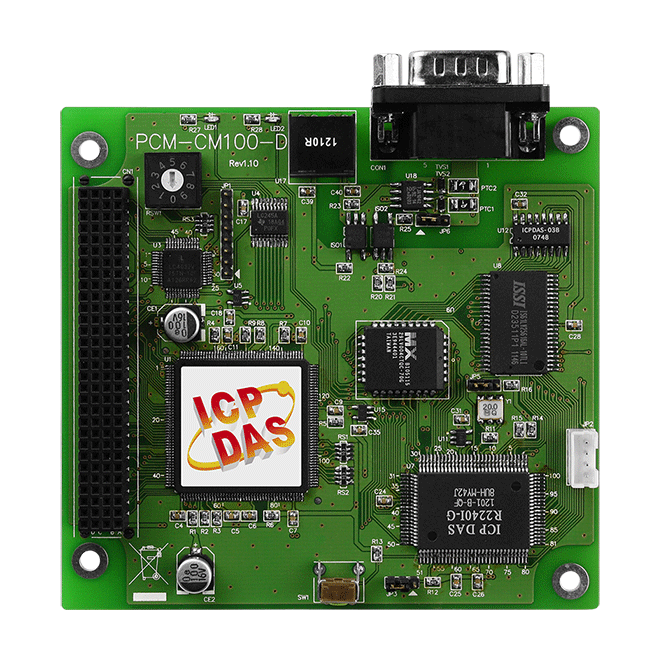
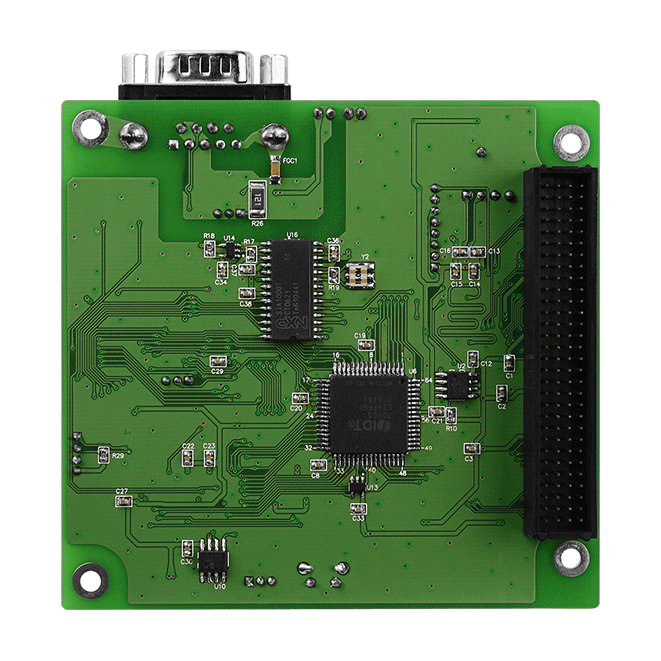
ICP DAS provides an open architecture platform for PCM-CM100-D. The PCM-CM100-D represents a very powerful and economic solution of an active CAN board with one CAN channels, covering a wide range of CAN applications. The 16-bit on-board microcontroller allows, among many other features, the filtering, preprocessing, and storage (with timestamp) of CAN messages as well as the real-time transmission of CAN messages. PCM-CM100-D also uses the new Phillips SJA1000T and Transceiver 82C250/251, which provide bus arbitration and error detection with auto correction and re-transmission function. Under the effect of the powerful microcontroller, this card can be made for one CAN controller without losing data, even in systems with a high bus load. Besides, equipped with integrated intelligence functions, the PCM-CM100-D makes it is possible to preprocess CAN data streams, thus relieving the PC of a considerable burden. As a result, real-time requirements on the PC applications are drastically reduced. Due to the state-of-the-art, it can be installed in a PCI-104 bus and supported truly “Plug & play” technology.
In addition, users can develop their own CAN application by using the PCM-CM100-D library. When the PCM-CM100-D is active, the data exchange between users’ application and can bus firmware is performed via the memory mapping method of the PCM-CM100-D.
應用
- DeviceNet, CANopen, CAN J1939, SDS (System Wide Network) protocol application.
- CAN bus communication application. .
- Industry automation
- Industrial Machinery
- Building Automation
- Food & Beverage
- Semiconductor Fabrication
- Control system
相似產品
| 軟體 | |
|---|---|
| 驅動 | Windows XP/7/8/10 (32-bit/64-bit OS) |
| SDK | VB 6.0, VC++ 6.0, BCB 6.0, Delphi 4.0 |
| CPU 模組 | |
|---|---|
| CPU | 80186, 80 MHz or compatible |
| EEPROM | 16 KB |
| Flash | 512 KB |
| NVRAM | 31 bytes (battery backup, data valid for up to 10 years) |
| SRAM | 512 KB |
| 實時時鐘 | Yes |
| LED 燈 | |
|---|---|
| 狀態 | 1 x CAN status 1 x Operating mode |
| PC Bus | |
|---|---|
| 類型 | PCI-104 |
| 板卡號碼 | By DIP switch |
| CAN | |
|---|---|
| 控制晶片 | NXP SJA1000T with 16 MHz clock |
| Ports | 1 |
| Baud Rate | 10 k ~ 1 M bps |
| 隔離 | 3000 VDC for DC-to-DC, 2500 Vrms for photo-couple |
| 終端電阻 | Jumper for 120 Ω terminal resistor |
| 電源 | |
|---|---|
| 功耗 | 400 mA @ 5 V |
| 機構 | |
|---|---|
| 尺寸 (mm) | 96 x 90( W x L) |
| 環境 | |
|---|---|
| 工作溫度 | 0 ~ +60 °C |
| 儲存溫度 | -20 ~ +70 °C |
| 濕度 | 5 ~ 85% RH, Non-condensing |