 |
|||||||
| New Linux CAN card drivers for PISO-CAN/PCM Series | ||
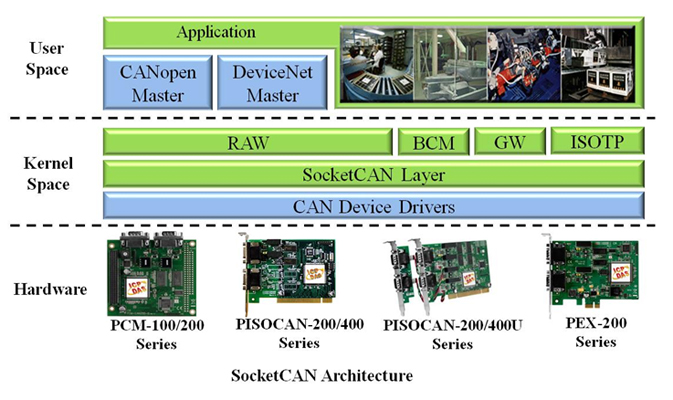
In recent years, CAN-based applications have demonstrated high degree of security and stability. More and more researches and developments of CAN-based devices have been published from the automotive and industrial domains. However, various programming methods which are due to the different hardware interface cause users getting problems on building or transplanting their applications. Therefore, the automobile industry pioneer puts forward the concept of the SocketCAN. The SocketCAN provides four kinds of interface. They are RAW, BCM, GW, and ISOTP. Each interface has its own functionalities. The following picture shows the software architecture. |
||
 |
||
The SocketCAN is based on the Linux operating system, and it contains the implementation interface of the network stack and the hardware driver. The hardware manufacturers program the hardware driver for the SocketCAN, and the network stack provides the standard BSD Socket APIs for users. Therefore, from the users’ point of view, they can easily and quickly program their applications without being familiar with the various APIs of the different hardware interface through the SocketCAN network stack. We have provided the SocketCAN drivers for several kinds of CAN interface cards. Users can implement their SocketCAN-based application on the Linux platform by using these cards. Besides, we also support static library of CANopen/DeviceNet master on x86 hardware platform. It can help users communicate with CANopen/DeviceNet slaves more easily. |
||
| Features: | ||
|
||
 |
||
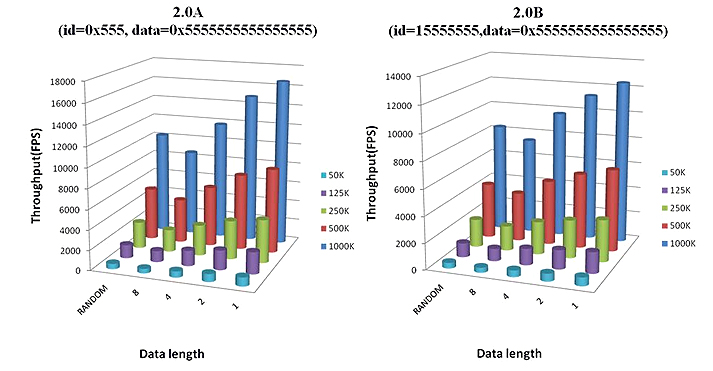
| Note: Hardware platform: Intel(R) Core(TM)2 CPU 6320 @ 1.86GHz, DDR2 667MHz 1.5GB Software platform: Kernel-2.6.32, Distro- Debian GNU/Linux 5.0 |
||
| Support Product List: | ||
|
||
| For more information about these products, please refer to the following website: http://www.icpdas.com/products/Remote_IO/can_bus/pcm-can200.htm http://www.icpdas.com/products/Remote_IO/can_bus/piso-can200.htm http://www.icpdas.com/products/Remote_IO/can_bus/piso-can200e.htm http://www.icpdas.com/products/Remote_IO/can_bus/piso-can400.htm About how to download the SocketCAN driver, please refer to the following website: http://ftp.icpdas.com.tw/pub/cd/fieldbus_cd/can/pci/piso-can200_400/linux_can_driver/socketcan/ |
||
| back | ||