|
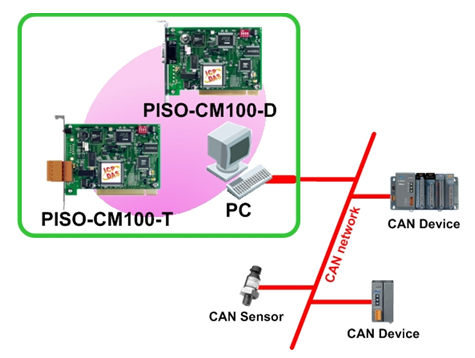
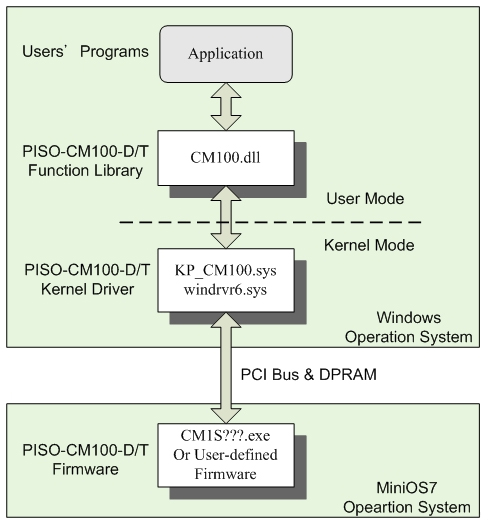
CAN (Controller Area Network) is a serial communication protocol with a very high level of security. It is an especially suit to distributed real-time system control and monitor, such as industrial machine control, aircraft engines, factory automation, medical equipment, building automation, remote data acquisition and control, environment monitor…etc. In order to use high performance CAN bus with PC, we provide a PCI interface CAN card, PISO-CM100. The mainly difference between PISO-CAN200/400 and PISO-CM100 are the implement performance and application variety. PISO-CAN200 and PISO-CAN400 are proper for lower bus-loading applications. However, PISO-CM100 can be applied in various and complicated applications because of its local CPU and DPRAM. This architecture can enhance the process performance of CAN messages, and reduce the loading of CPU in your PC. On Windows 98/Me/NT/2000/XP platform, the VC++, VB, BCB demos and libraries are provided. Moreover, in order to simplify the development of user-defined firmware, we also provide easy-to-use C/C++ library and development architecture on MiniOS7 operation system. Therefore, PISO-CM100 help users not only to build their CAN system easily, but to structure a CAN network with ICP DAS CAN-related products and the CAN products from other companies. The general application architecture is depicted as the following figure: |
|
|
- 33MHz 32bit 5V PCI bus (V2.1) plug and play technology
- Follow ISO11898-2 specification
- Philip SJA1000T CAN controller
- Philip 82C250 CAN transceiver
- CAN controller frequency :16 MHz
- 2500Vrms photo-isolation protection on CAN side
- Jumper select 120Ω terminator resistor for CAN bus
- One CAN communication port
- Compatible with CAN specification 2.0 parts A and B
- Provide default baud 10Kbps, 20Kbps, 50Kbps, 125Kbps, 250Kbps, 500Kbps, 800Kbps, and 1Mbps
- Allow user-defined baud
- 2048 records reception buffer and 256 records transmission buffer
- Cyclic transmission precision: ±0.5ms precision when cyclic time is below 10ms , ±1% error when cyclic time exceeds 10ms.
- Provide 5 sets of cyclic transmission.
- Timestamp of CAN message with at least ±1ms precision
- 186 compactable CPU inside
- 8K bytes DPRAM inside
- RTC(Real Time Clock) inside
- 2 indication LED (one for green and another for red)
- Support user-defined firmware
- Support firmware update
- VC++, VB, BCB demos and libraries are given
- C/C++ function libraries of firmware side are given
- Drivers for Windows 98/Me/NT/2000/XP
|
|