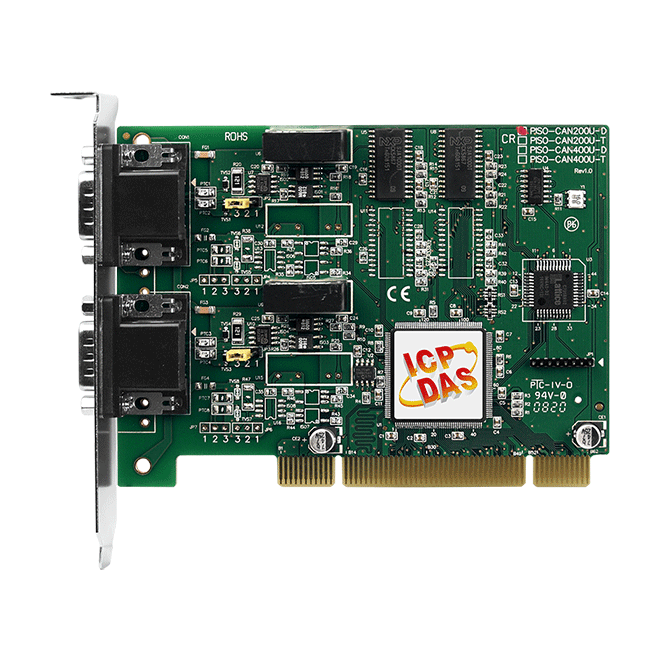
1-Port CAN Universal PCI Card

Features
- One CAN bus communication port
- Compatible with CAN specification 2.0 parts A and B
- On-board optical isolation protection
- Programmable transfer rate up to 1 Mbps
- 2500 Vrms photo couple isolation on the CAN bus
- Jumper select 120Ω terminal resistor for each port
- Direct memory mapping to the CAN controllers
- 33MHz 32bit 5V PCI bus (V2.1) plug and play
- Universal PCI card, supports both 5V and 3.3V PCI bus
- We have verified to drive 100 CAN nodes at the same time
Introduction
The CAN (Controller Area Network) is a serial communication protocol, and efficiently supports distributed real-time control with a very high level of security. It is an especially suit for networking "intelligent" devices as well as sensors and actuators within a system or sub-system. In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but instead prioritized messages are transmitted. As standalone CAN controller, PISO-CAN100U-D can represent an economic solution of an active CAN board. It has one CAN bus communication port with 9-pin D-sub connector, and has the ability to cover a wide range of CAN applications. Besides, PISO-CAN100U-D uses the new CAN controller Phillips SJA1000T and transceiver 82C250, which provide bus arbitration, error detection with auto correction and re-transmission function. It can be installed in a 5V PCI slot and supported truly “Plug & play”.
Applications
• CAN bus communication application
• DeviceNet, CANopen, CAN J1939, SDS(System Wide Network) protocol application
• Control System
• Building Automation
• Factory Automation
• Distributed data acquisition
Ordering Information
| PRODUCT SERIES | DESCRIPTION | QNT. | INQUIRY |
|---|---|---|---|
Similar Products
| Software | |
|---|---|
| Driver | Windows XP/7/8/10 (32-bit/64-bit OS), Linux 2.6.x ~ 5.4.0, LabView, DASYLab, InduSoft |
| SDK | VB 6.0, VC++ 6.0, BCB 6.0, Delphi 4.0, C#.Net, VB.Net |
| PC Bus | |
|---|---|
| Type | Universal PCI, 3.3 V and 5 V, 33 MHz, 32-bit, plug and play |
| CAN | |
|---|---|
| Controller | NXP SJA1000T with 16 MHz clock |
| Ports | 1 |
| Baud Rate | 10 k ~ 1 M bps |
| Isolation | 3000 VDC for DC-to-DC, 2500 Vrms for photo-couple |
| Terminal Resistor | Jumper for 120 Ω terminal resistor |
| Power | |
|---|---|
| Consumption | 225 mA @ 5 V |
| Mechanical | |
|---|---|
| Dimensions (mm) | 126 x 85 x 22 (W x L x D) |
| Environment | |
|---|---|
| Operating Temperature | 0 ~ +60 °C |
| Storage Temperature | -20 ~ +70 °C |
| Humidity | 5 ~ 85% RH, Non-condensing |




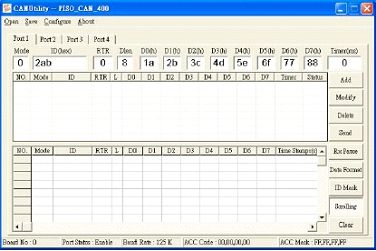
- Can be a CAN system monitor tool with CAN cards
- It is a good tool to test CAN system
- Send/Receive/Record CAN messages
- Provide cyclic transmission function
- Record the CAN messages with filtered ID and time stamp
- Support: 2000/XP/7
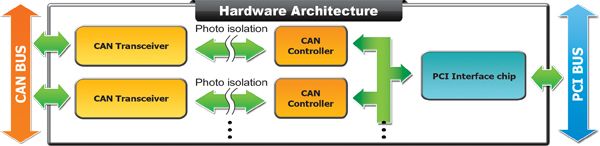
Hardware Architecture
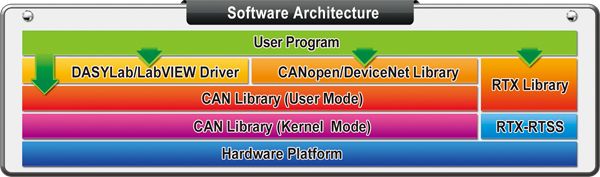
Software Architecture
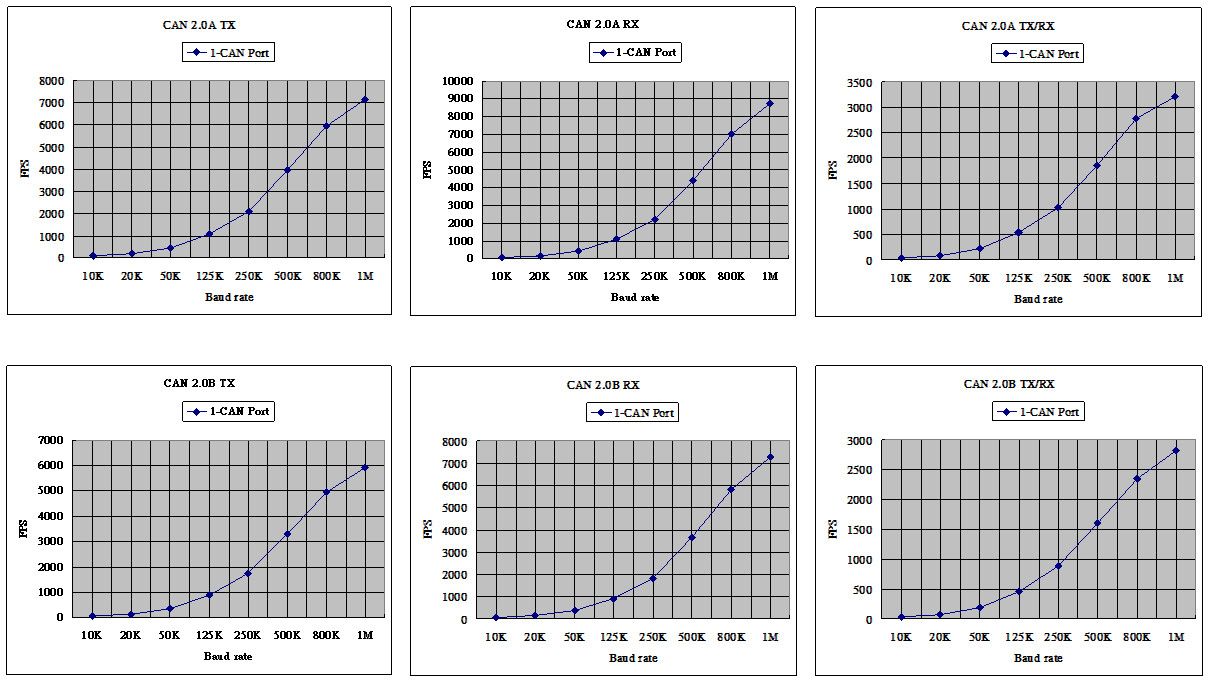
Performance Test
Platform:OS:Windows XP SP 3
CPU:Intel(R) Core(TM) i3 CPU 550 @ 3.20GHz
RAM:1.8GB
The 1 CAN port send, receive or send/receive 100,000 CAN messages at the same time. The average FPS values are shown below:
| Baud rate (bps) | 1-CAN Port | |||||
|---|---|---|---|---|---|---|
| 2.0A, 8 bytes data | 2.0B, 8 bytes data | |||||
| TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | |
| 10K | 88 | 88 | 43 | 73 | 73 | 37 |
| 20K | 176 | 176 | 87 | 146 | 146 | 75 |
| 50K | 440 | 441 | 218 | 365 | 367 | 188 |
| 125K | 1088 | 1104 | 537 | 899 | 917 | 461 |
| 250K | 2100 | 2208 | 1025 | 1745 | 1834 | 882 |
| 500K | 3975 | 4414 | 1856 | 3305 | 3668 | 1612 |
| 800K | 5930 | 7008 | 2787 | 4950 | 5830 | 2355 |
| 1M | 7129 | 8722 | 3216 | 5926 | 7257 | 2820 |